Active Deterrence
Start projektu: grudzień 2025 — obecnie
Rola: AI / Computer Vision Engineer
Status: 🟢 Aktywny rozwój
Współpraca: SmartDrones, Karabela
Opis projektu
Active Deterrence to system AI Vision dla autonomicznych dronów security. Projekt adresuje kluczową lukę w obecnych rozwiązaniach bezpieczeństwa: istniejące systemy potrafią wykryć ruch, ale nie rozumieją tego, co widzą i nie mogą odpowiednio zareagować.
Obecne ograniczenia autonomicznych dronów security:
- detekcja bez zrozumienia — potrafią wykryć ruch, ale nie klasyfikują, co wywołało alert
- wysoki poziom fałszywych alarmów — alerty wywoływane przez zwierzęta, cienie, liście
- brak inteligentnej reakcji — operatorzy są zalewani powiadomieniami
- tylko pasywny monitoring — brak możliwości aktywnego odstraszania
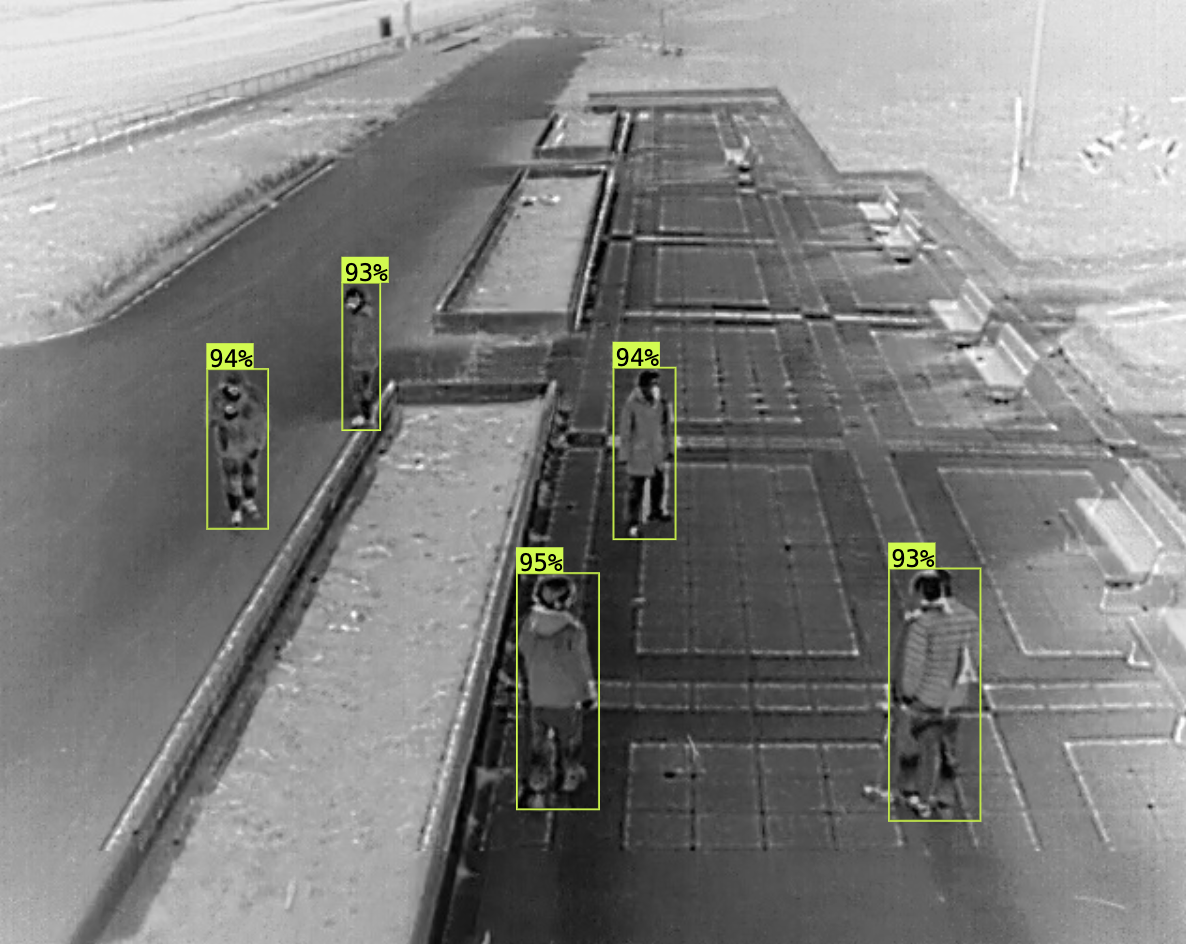
Buduję kompletny pipeline AI, który przekształca surowy materiał wideo z drona w użyteczną inteligencję bezpieczeństwa — wykrywając i klasyfikując obiekty (osoby, pojazdy), filtrując fałszywe alarmy i umożliwiając automatyczne odstraszanie głosowe po wykryciu intruza.
Architektura
Active Deterrence to pipeline obraz → detekcja → decyzja → głos:
- Ingestion wideo — MP4/RTSP/JPG z dronów (tryby dzień + IR/noc)
- Warstwa Computer Vision — YOLOv8 dostrojony na nagraniach z dronów
- Logika alertów — próg pewności (40%+), alert cooldown, sampling klatek
- Voice AI (Active Deterrence) — ElevenLabs TTS do alertów głosowych w czasie rzeczywistym (~300-500ms latencji)
- Pipeline treningowy — GPU Droplet (H100/A100) na Digital Ocean z monitoringiem TensorBoard
Rozwój modelu
Kluczowym aspektem projektu był iteracyjny proces treningu modelu. Przeprowadziłem 4 iteracje treningu z różnymi kombinacjami datasetów:
| Model | Dataset | mAP@50 | Precision | Recall | Kluczowy wniosek |
|---|---|---|---|---|---|
| v2 | Tylko Karabela (218 img) | 82.4% | 86.7% | 85.4% | Baseline, zaobserwowany overfitting |
| v3 | Karabela + HIT-UAV (~3k img) | 93.5% | 93.2% | 90.3% | Najlepsza wydajność |
| v4 | + VisDrone (~10k img) | 62.0% | 79.1% | 57.4% | Degradacja przez domain mismatch |
Wnioski techniczne
Więcej danych ≠ lepszy model
Dodanie 10 000 zdjęć z VisDrone faktycznie pogorszyło wyniki. Analiza ujawniła nierównowagę klas (dominacja pojazdów), domain mismatch (różne wysokości/kąty) i problemy z małymi obiektami.
Analiza Confusion Matrix jest krytyczna
Model v4 wykazał 9000 false negatives dla klasy vehicle — obiekty, które model całkowicie pominął. To ukierunkowało strategię optymalizacji.
Detekcja małych obiektów jest trudna
Pojazdy z wysokopułapowego nagrania drona często pojawiają się jako obiekty <20px. Rozwiązania obejmują SAHI (Slicing Aided Hyper Inference), preprocessing przez kafelkowanie i większe architektury modeli.
Co zrobiłem
- Zaprojektowałem architekturę systemu AI Vision dla dronów security
- Zbudowałem pipeline danych do pobierania i audytu z Google Drive
- Wykonałem labeling w Roboflow (klasy person, vehicle)
- Wytrenowałem 4 iteracje modelu z różnymi datasetami
- Zintegrowałem zewnętrzne datasety (HIT-UAV, VisDrone)
- Przeanalizowałem confusion matrix i zidentyfikowałem problemy small objects
- Zintegrowałem ElevenLabs TTS do alertów głosowych
- Zbudowałem demo Streamlit z pełnym flow: upload → detekcja → alert
- Przygotowałem infrastrukturę treningu GPU (Digital Ocean + TensorBoard)
Umiejętności
| Kategoria | Technologie |
|---|---|
| Computer Vision | YOLOv8, PyTorch, OpenCV, Roboflow |
| Deep Learning | Transfer Learning, Hyperparameter Tuning |
| MLOps | TensorBoard, Digital Ocean GPU, Docker |
| Voice AI | ElevenLabs TTS |
| Backend | FastAPI, Python |
| Frontend | Streamlit |
| Dane | FFmpeg, narzędzia do adnotacji |
Rezultaty
- Model v3 z mAP 93.5% — najlepszy wynik
- Działające demo: upload → detekcja → alert głosowy
- Zidentyfikowany problem detekcji małych obiektów (klasa vehicle)
- Pipeline treningowy gotowy do skalowania
- System Voice AI z latencją ~300-500ms
- Infrastruktura treningu GPU na Digital Ocean
Roadmapa
MVP (Styczeń 2026) ✅
- Computer Vision — detekcja osób/pojazdów
- Model v2/v3/v4 (iteracyjny trening)
- Demo Streamlit z Voice AI
- Analiza confusion matrix
Następna faza: Optymalizacja hiperparametrów (Q1 2026)
- Trening na GPU Droplet z tuningiem hiperparametrów
- Workflow SAHI dla detekcji małych obiektów
- Strategie balansowania klas
Przyszłość: MLOps i produkcja (Q1-Q2 2026)
- MLflow Tracking & Model Registry
- Wdrożenie backendu FastAPI
- Inferencja RTSP w czasie rzeczywistym
- Integracja z platformą SmartDrones
Zdjęcia